Nayeon Kim

Hello! I am an AI Researcher at Samsung AI Center(ex-SAIT AI Research Center) in Suwon, South Korea.
I received a B.S. degree in Computer Science and Engineering with a minor in Automotive Software Design. Previously, I was a research intern at KETI (Korea Electronics Technology Institute), mentored by Dr. Mingyu Park. During the internship, I focused on unsupervised depth prediction and camera motion estimation. I am interested in developing robust visual reasoning capabilities for embodied agents operating in real-world environments such as autonomous driving and robotics, using approaches from generative modeling and multi-modal learning.
News
| Dec 2024 | Our paper “Unveiling the Hidden” has been accepted to NeurIPS 2024! |
|---|---|
| Jun 2023 | Our paper “D-3DLD” has been accepted to ICASSP 2023! |
Work Experiences

AI Researcher
Research focus: Computer vision, specializing in autonomous driving perception and generative modeling
- Developing a generative model for industrial process automation by prediction time-series data
- Developed computer vision models for high-level semantic and geometric understanding of road scenes in autonomous driving
- Published "Unveiling the Hidden: Online Vectorized HD Map Construction with Clip-Level Token Interaction and Propagation" (NeurIPS 2024)
- Published "D3DLD: Depth-aware Voxel Space Mapping for Monocular 3D Lane Detection with Uncertainty" (ICASSP 2023)
Research Intern
KETI (Korea Electronics Technology Institute)
Research focus: 3D Computer vision, specializing in monocular 3D perception
- Developed a computer vision model for monocular depth prediction
- Published "Unsupervised Depth Prediction and Camera Motion Estimation in a Dynamic Environment" (KASE 2018)
Publications
-
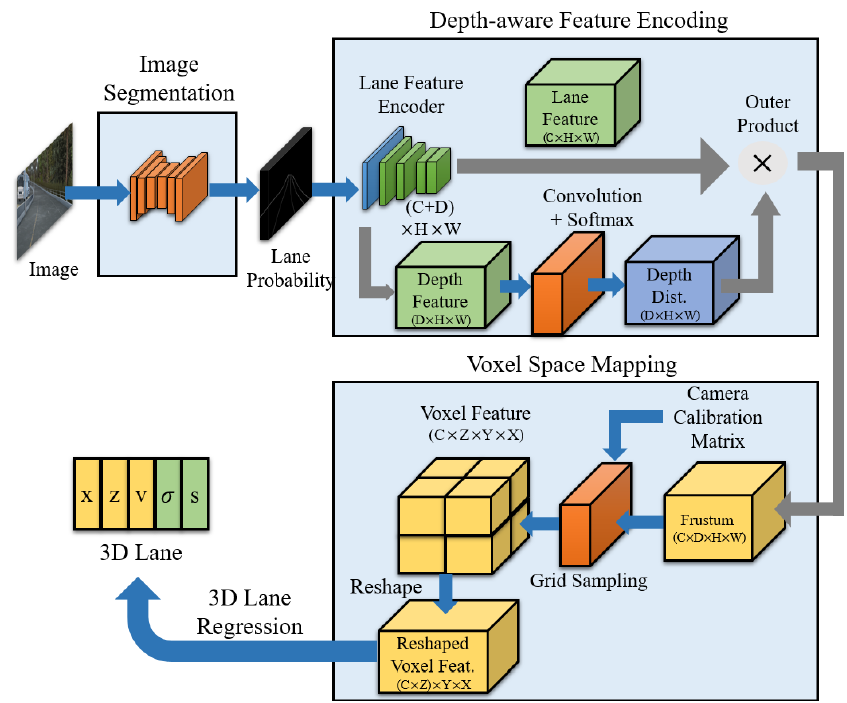 D-3DLD: Depth-Aware Voxel Space Mapping for Monocular 3D Lane Detection with UncertaintyIEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), 2023
D-3DLD: Depth-Aware Voxel Space Mapping for Monocular 3D Lane Detection with UncertaintyIEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), 2023 -
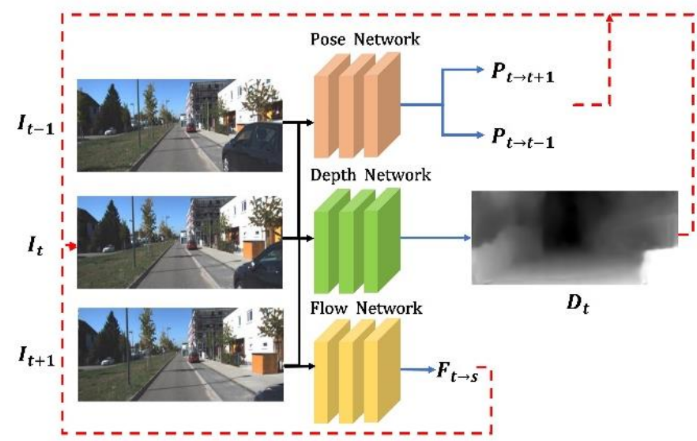 Unsupervised Depth Prediction and Camera Motion Estimation in a Dynamic EnvironmentKorean Society of Automotive Engineers (KASE) Annual Conference, 2018
Unsupervised Depth Prediction and Camera Motion Estimation in a Dynamic EnvironmentKorean Society of Automotive Engineers (KASE) Annual Conference, 2018



Education

Kookmin University
B.S. in Computer Science and Engineering
Minor in Automotive Software Design
- Graduated Summa Cum Laude (ranked 1st)
Patents
- Filed on 11/04/2024
- Filed on 03/14/2024
- Filed on 07/12/2022
- Method and Apparatus for Determining Slope of Road Using Side View Camera of VehicleUS-Application No. 17/685,917Filed on 03/03/2022
Projects

- Developed an OpenCV-based lane detection algorithm robust to various weather and lighting conditions
- Integrated the algorithm using ROS for multi-module communication and scenario testing
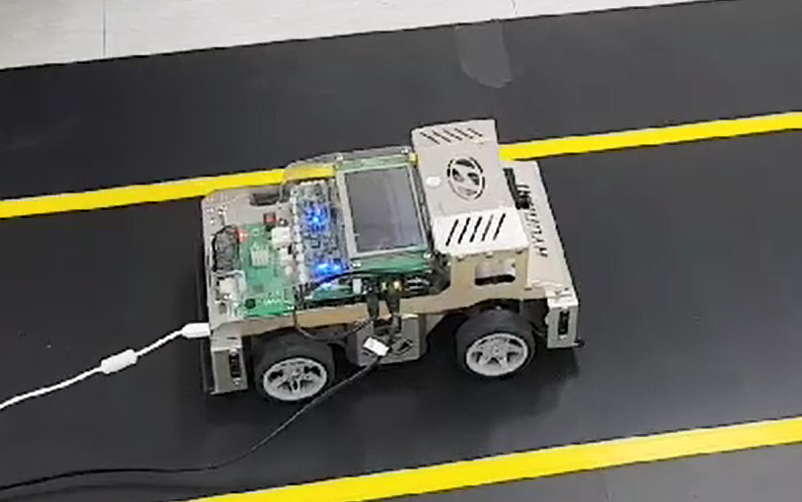
- Developed a lightweight lane detection algorithm using OpenCV, optimized for low latency and high precision on the mini car's hardware.
- Implemented scenario-based driving logic, handling the full pipeline from raw sensor input to final vehicle actuation.
- Served as Team Lead, responsible for project planning, task delegation, and overall team management.

- A multi-level driving automation system that predicts driver behavior via an eye-tracker, validated in both a driving simulator and a real-world vehicle.
Teaching Experiences
Introduction to Engineering Design
Teaching Assistant
Kookmin University